



>
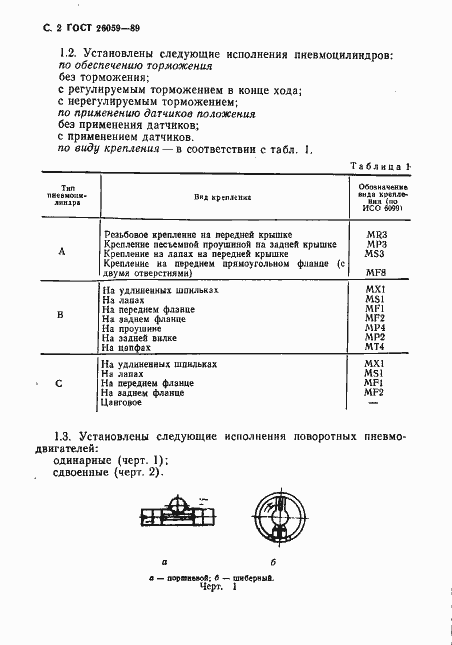
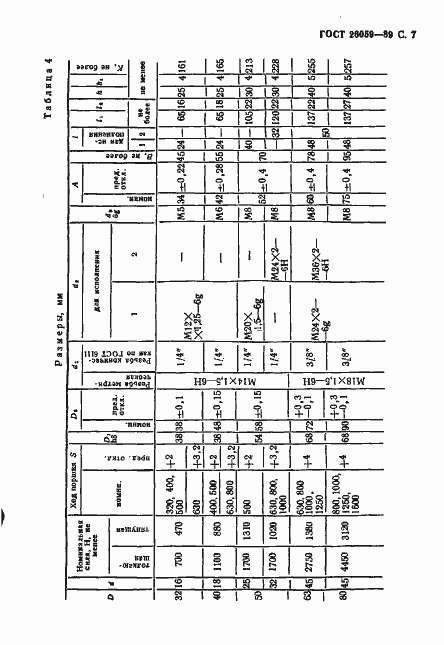
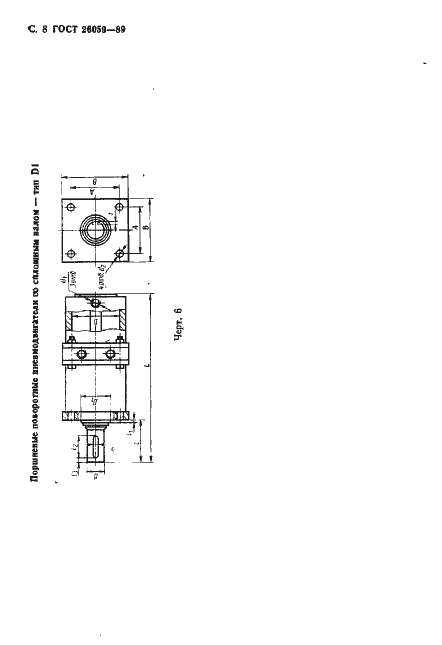
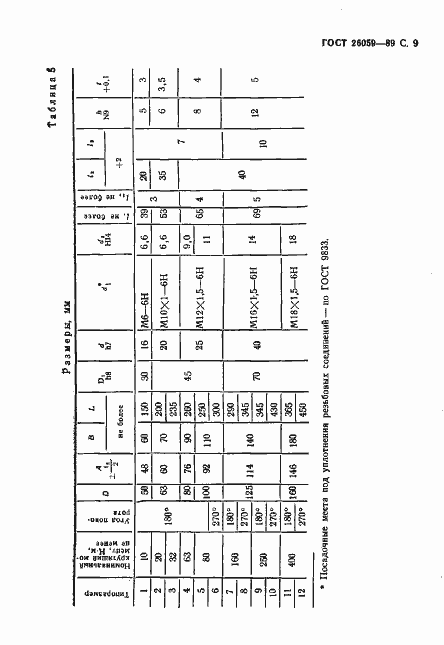
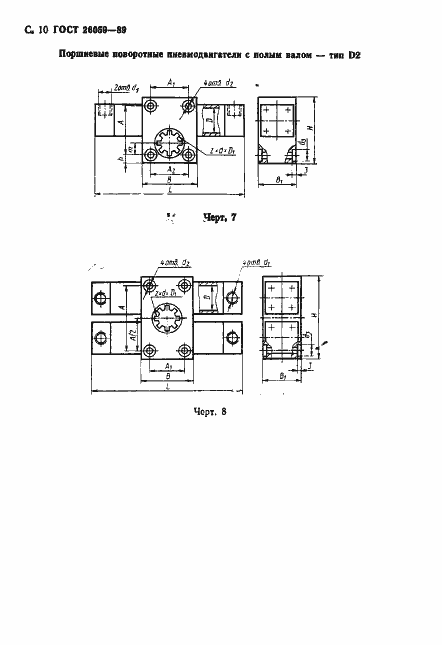
ГОСТ 26059-89 Роботы промышленные. Пневмодвигатели исполнительных устройств. Типы, основные параметры и присоединительные размеры
ГОСТ
Скачать ГОСТ в PDF или DOC бесплатно
Услуги по этому стандарту— закажите работы у исполнителей
Основная информация
Обозначение:
ГОСТ 26059-89
Статус:
Действует
Тип:
ГОСТ
Название русское:
Роботы промышленные. Пневмодвигатели исполнительных устройств. Типы, основные параметры и присоединительные размеры
Название английское:
Industrial robots. Pneumatic motors of actuating mechanisms. Types, basic parameters and mounting dimensions
Даты и сроки
Дата издания:
03-13-90
Дата введения в действие:
06-30-90
Дата завершения срока действия:
-
Применение и описание
Область и условия применения:
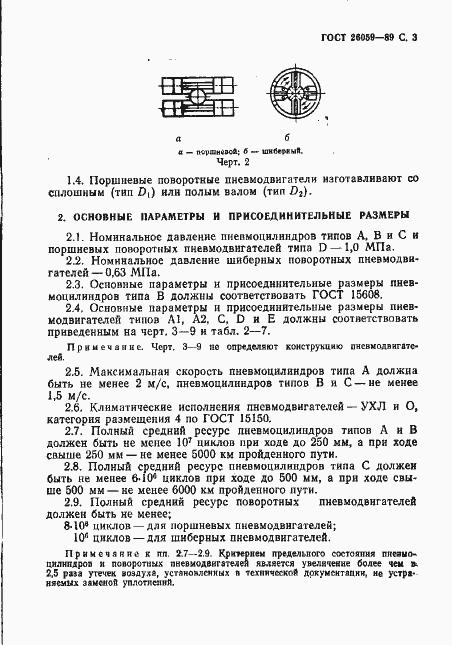
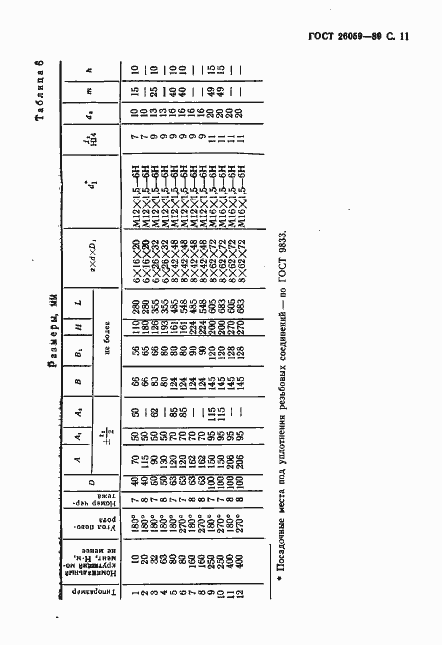
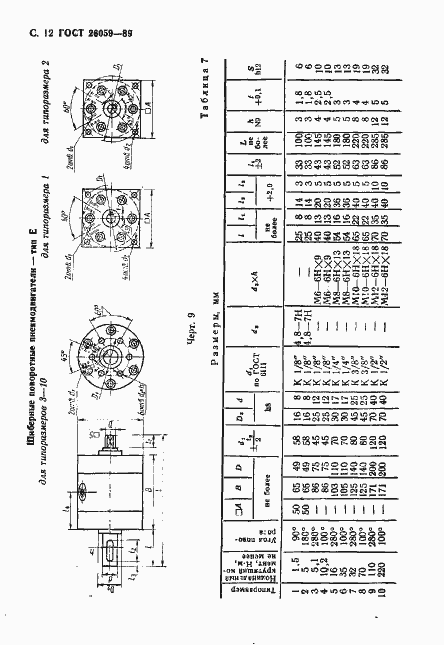
Настоящий стандарт устанавливает типы, основные параметры и присоединительные размеры пневмодвигателей исполнительных устройств промышленных роботов и других машин, работающих при давлении до 1,0 МПа на сжатом воздухе, очищенном не грубее 7-8-го классов загрязненности по ГОСТ 17433 и содержащем распыленное масло вязкостью от 10 до 32 мм кв./с при температуре 50 град. С с концентрацией 2-4 капли на 1 м куб. воздуха, приведенного к нормальным условиям по ГОСТ 19862. Настоящий стандарт не распространяется на специальные типы пневмодвигателей, используемых в промышленных роботах и других машинах
Связи и замены
Заменяющий:
-
Взамен:
ГОСТ 26059-85
ГОСТ 26059-89 Роботы промышленные. Пневмодвигатели исполнительных устройств. Типы, основные параметры и присоединительные размеры


 +7 (495) 789-95-19
+7 (495) 789-95-19

